بررسی استاتور و نحوه عملکرد آن در موتور
یکی از اجزا مهم و جدا نشدنی در انواع موتور الکتریکی، ژنراتورها و دینام خودرو، استاتور است. این قطعه نقش مهمی در عملکرد انواع موتور دارد. در این مقاله به بررسی تعریف و چیستی استاتور، ساختمان استاتور و نحوه عملکرد آن می پردازیم.
استاتور چیست و چگونه عمل می کند؟
در انواع موتورهای الکترومغناطیسی دوار 2 قسمت اصلی وجود دارد که استاتور یکی از آن ها است. استاتور به بخش ساکن یا ایستا در موتور گویند. همانطور که مشخص است، استاتور همیشه در مکان خود ثابت است. این درحالی است که دیگر جز مهم در موتور، یعنی روتور همیشه در حال چرخش است.
چنانچه می خواهید با روتور و نحوه کار آن آشنا شوید، می توایند مقاله روتور چیست را مطالعه نمایید.
یک استاتور به صورت یک سلیندر یا استوانه توخالی است که دور تا دور آن سیم پیچ های رسانا قرار دارد. همچنین ورقه های نازکی از جنس آلومینیوم یا آهن به صورت موازی کمی مایل (مورب) در اطراف آن چیده شده است. حفره موجود در استاتور به دلیل این است که قطعه دیگر، یعنی روتور در داخل آن قرار گیرد.
نحوه کار استاتور
با اتصال موتور به منبع تغذیه (خواه الکتروموتور باشد که با جریان مستقیم برق کار می کند، خواه دینام ماشین که با باتری کار می کند) با ورود جریان برق به سیم پیچ های موجود در استاتور یک میدان مغناطیسی در آن به وجود می آید. با توجه به ساختار استاتور و نحوه قرارگیری روتور در آن، میدان مغناطیسی به وجود آمده منجر به چرخش روتور می شود.
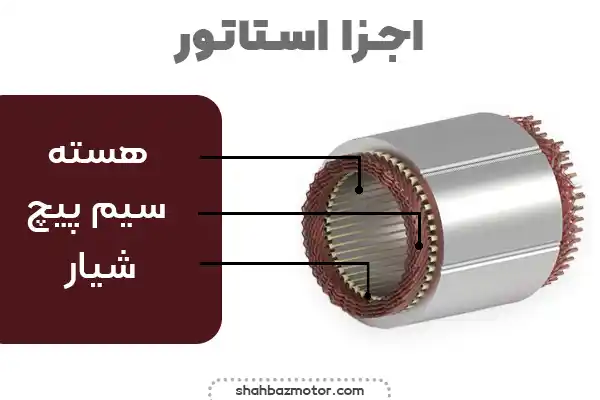
ساختمان و اجزا استاتور
همانطور که پیش از این اشاره شد، استاتور از بدنه فولادی، سیم پیچ های رسانا (عمدتا مسی) و ورقه های فلزی نازک ساخته شده است. این ساختار باعث شده تا استاتور یک رسانای قوی باشد و به خوبی جریان را از خود عبور دهد.
کلام پایانی
همانطور که بررسی شد، استاتور یک بخش مهم در موتور است. با وجود اینکه این عنصر ساکن است اما ممکن است در صورت استفاده نادرست دچار خرابی شده و به الکتروموتور آسیب وارد کند. به همین دلیل لازم است پیش از استفاده از طرفیت استاتور آگاهی داشته باشیم.